1. 定义和特点
- 强化学习(Reinforcement Learning)解决的是代理(Agent)在未知环境(Environment)中通过交互(Interaction)进行学习的方法。不同于监督学习和无监督学习,属于第三种机器学习范式。(By Richard Sutton)
- 没有样本标签,只有行动的奖励信号。
- 最终反馈结果的获得是延迟的。
- 主要针对有前后关系的序列数据,无独立同分布假设。
- 当前行为会影响后续收到的回报值大小。
2. 四个基本组件
策略(Policy): 当前Agent所处状态到下一步采取行动的映射,是强化学习的学习目标。
回报(Reward): 衡量Agent采取的行动的好坏的值。
状态值函数(Value Function): 从当前状态开始获得的预期长期累计回报,代表对当前状态价值高低的估计。
环境模型(Model): 对当前环境中各个变量变化情况的建模表示。典型的是离散变量下的概率分布模型。
3. 四个重要概念
Agent: 学习在未知环境中做决策的对象。例如棋类游戏中的棋子。
Environment: Agent的交互对象,针对Agent的行动,给出回报及下一步的状态。
Policy: $\pi_{t}(a_{t}|s_{t})$
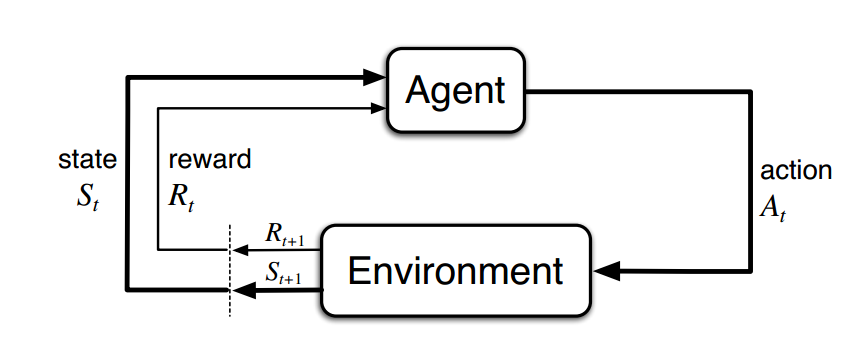
- 长期累积回报: $G_{t}=R_{t+1}+\gamma R_{t+2}+\gamma^{2}R_{t+3}+\cdots=\sum\limits_{k=0}^{n}\gamma^{k}R_{t+k+1}$, $\gamma$ 是折扣因子。Agent的目标就是通过与环境的不断交互,学习最优的策略,从而最大化长期累计回报。
4. MDP(Markov Decision Process)
- MDP描述了一种用概率分布建模的环境,环境中的状态转移具有马尔科夫性,即下一时刻的状态只与当前状态s和采取的动作a有关,而与之前的状态和动作无关。针对强化学习要解决的环境交互式学习任务,往往简化其环境是MDP,方便求解。
5. 状态值函数,动作价值函数与Bellamn方程
$v_{\pi}(s) = E_{\pi}[G_{t}|S_{t}=s]=E_{\pi}[\sum\limits_{k=0}^{n}\gamma^{k}R_{t+k+1}|S_{t}=s]$
$q_{\pi}(s, a) = E_{\pi}[G_{t}|S_{t}=s, A_{t}=a]=E_{\pi}[\sum\limits_{k=0}^{n}\gamma^{k}R_{t+k+1}|S_{t}=s,A_{t}=a]$
Bellman方程: $v_{\pi}(s) = \sum\limits_{a}\pi(a|s)\sum\limits_{s’, r}p(s’,r|s,a)[r+\gamma v_{\pi}(s’)]$ <—> 状态值函数递归求解方程
最优值函数: $v_{\star}(s) = \max\limits_{\pi}v_{\pi}(s) \Rightarrow v_{\star}(s)=\max\limits_{a \in A(s)}=\sum\limits_{s’, r}p(s’,r|s,a)[r+\gamma v_{\star}(s’)]$
最优动作价值函数: $q_{\star}(s, a) = \max\limits_{\pi}q_{\pi}(s, a) \Rightarrow q_{\star}(s, a)=\sum\limits_{s’, r}p(s’, r|s,a)[r + \gamma \max\limits_{a’}q_{\star}(s’, a’)]$
动作价值函数在求解最优策略时更加直接,所以更加常用。
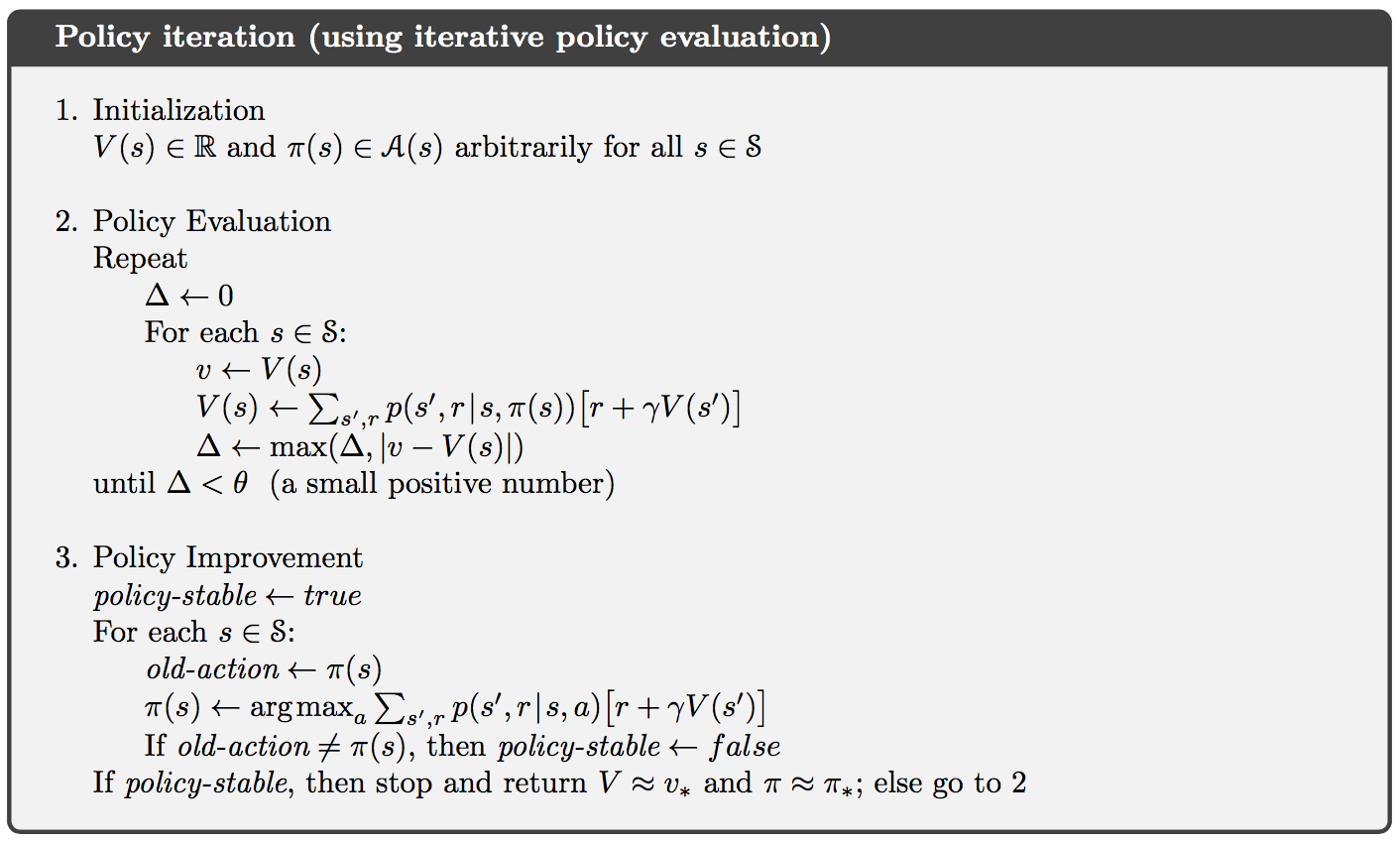
6. 依赖模型的最优策略函数计算:策略迭代与值迭代
策略迭代: 包含策略评估和策略提升两个部分。
值迭代: 直接迭代计算状态值函数。
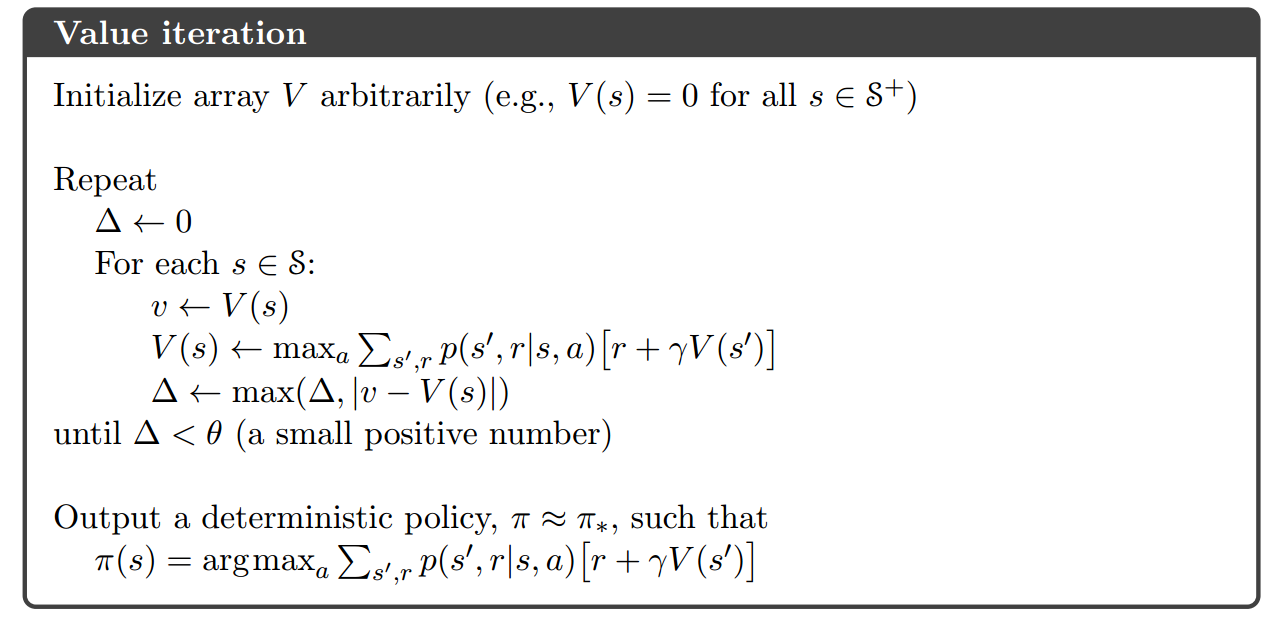
策略迭代和值迭代都是一种动态规划的思路,都需要事先知道环境的具体MDP模型,但实际情况中很难预先估计。
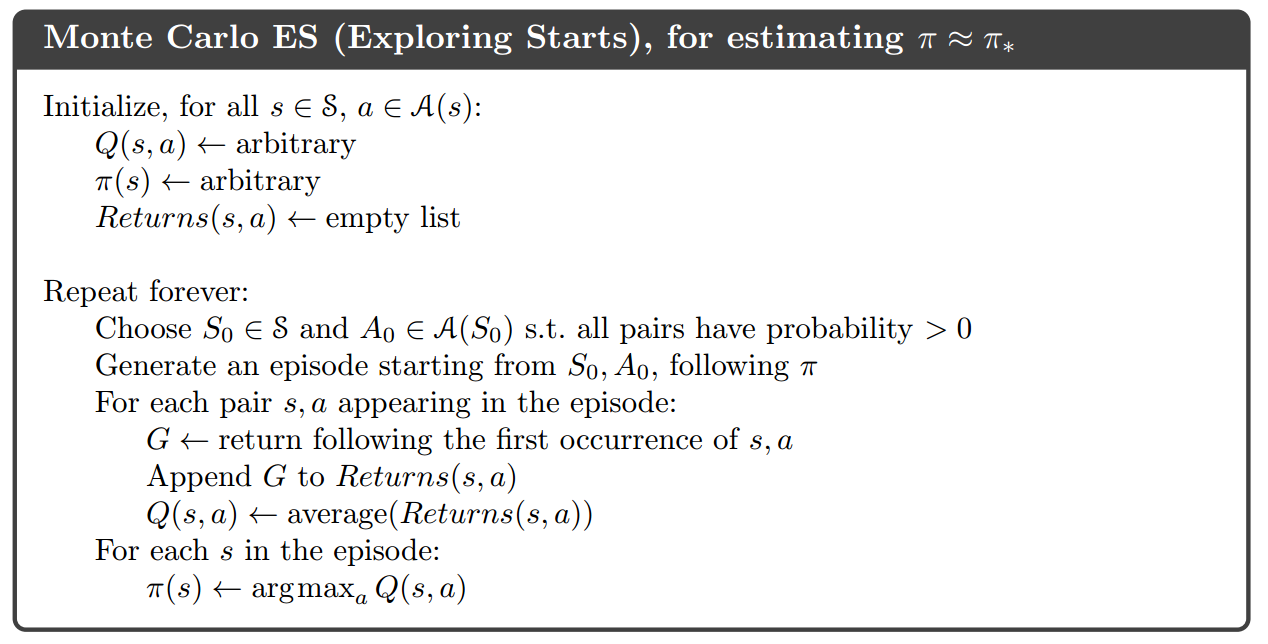
7. 模型无关的值函数计算: Monte-Carlo和Temporal-Difference
- 模型无关的值函数估计方法不需要事先知道环境的具体模型,主要通过与环境交互过程中产生的实际经验${s_{t},a_{t},r_{t+1},s_{t+1},a_{t+1},r_{t+2},…,s_{T},a_{T},r_{T+1}}$来直接估计值函数。
Monte-Carlo方法: 使用完整经验片段(episode)中最终回报的平均值来估计值函数。
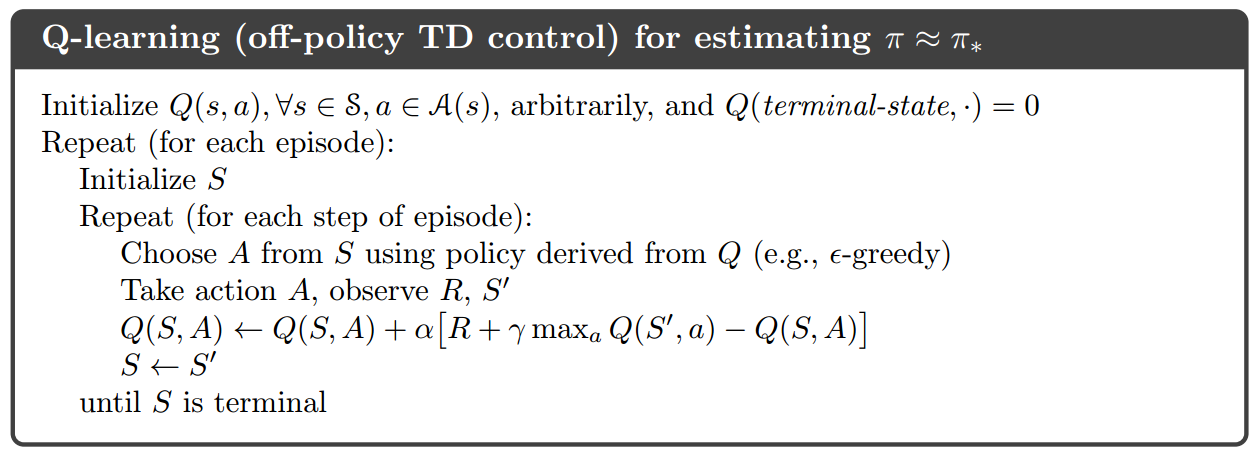
Temporal-Difference方法: 从不完整的经验片段中估计值函数。
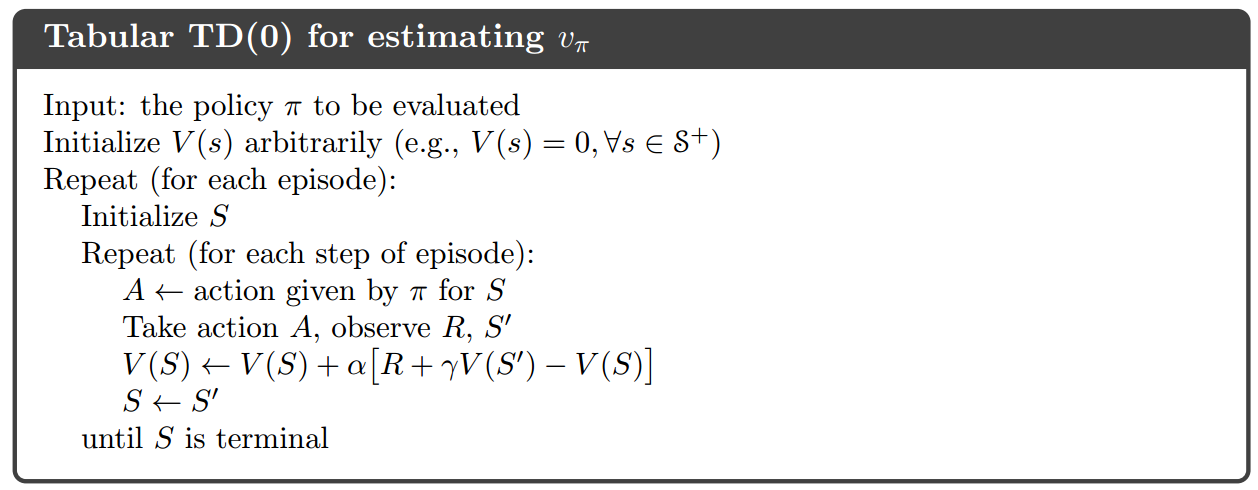
Q-Learning: TD方法的一种,直接估计动作价值Q函数。
8. 近似求解方案
前面的强化学习算法一般是将(s,a)存在一张表中,在状态空间或动作空间很大时,耗费内存空间并且泛化能力差,使用函数来近似值函数或动作价值函数可以避免这些问题。即$v_{\pi}(s) \approx \hat{v}(s,w)或q_{\pi}(s)=\hat{q}(s,a,w)$,这里w是函数的参数。
常见的近似函数优线性函数和神经网络。线性函数往往需要精心构造表示状态的特征,而神经网络可以直接接受原始输入。
Deepmind开发的玩Atari游戏的DQN和围棋程序Alphago的策略网络都使用了卷积神经网络来近似值函数或动作价值函数,展现了优异的结果。
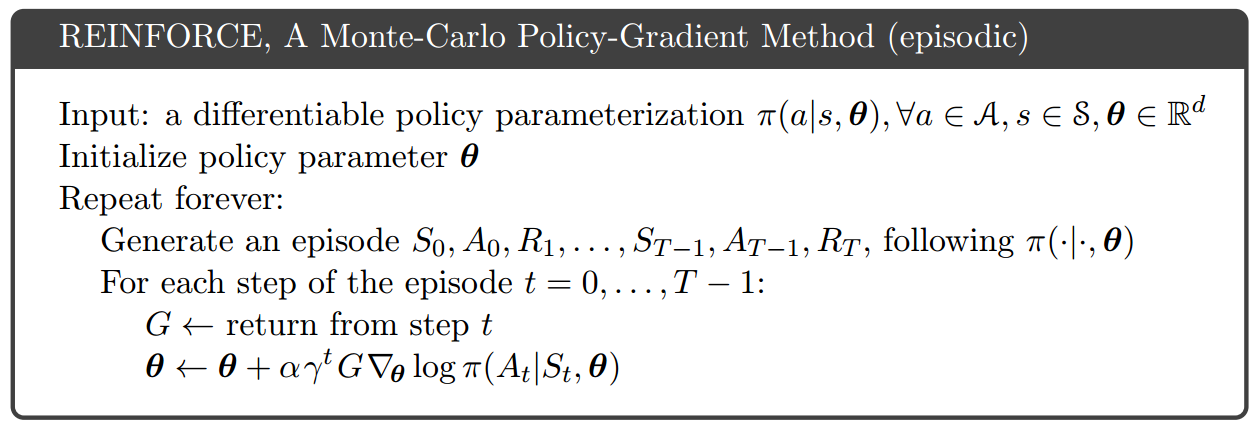
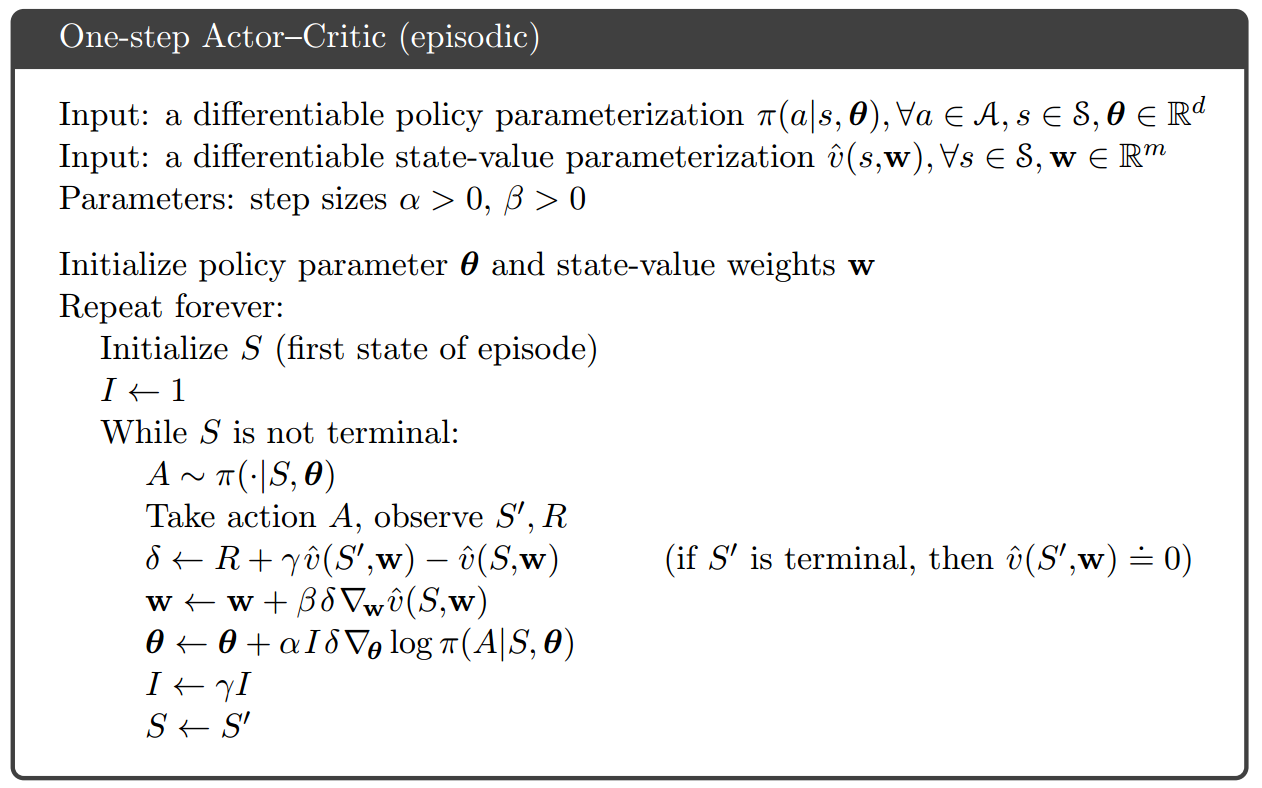
9. 策略梯度方法
直接近似策略函数: $\pi\{a|s,\theta\}=p(A_{t}=a|S_{t}=s,\theta_{t}=\theta)$。直接根据状态计算出最终的动作值.
- REINFORCE方法: 根据策略函数梯度更新参数值。
- Actor-Critic方法: 结合使用值函数近似和策略函数近似。值函数作为critic来知道策略函数的训练。
10. 强化学习的应用
- 游戏AI: 视频游戏(Atari、星际争霸),棋类游戏(围棋)
- Web服务: 新闻(Yahoo!)、广告、商品个性化推荐(Alibaba)
- 机器人控制
- 聊天机器人
11. 参考资料
[1]Reinforcement Learning Lecture by David Silver</br>
[2]CS 294: Deep Reinforcement Learning by UC Berkeley</br>
[3]强化学习by莫凡</br>
[4]Reinforcement Learning: An Introduction (2nd Edition) by Richar Sutton</br>
[5] https://github.com/ShangtongZhang/reinforcement-learning-an-introduction</br>
[6]OpenAI Gym(比较不同强化学习算法的软件环境平台,包含很多游戏环境)</br>
[7]Deepmind Rearch Blog</br>
[8]Deep Reinforcement Learning: An Overview by Yuxi Li
